















客户痛点

方案介绍
通过合理的系统规划、机器人设计、路径规划、目标识别与定位、操作控制、数据交互与管理以及安全与监控措施的组合,实现机器人自动运行、抵达指定货架并将货物送至人员手中。
方案特点

提升存储空间
实现密集库单深位、多深位组合存储,根据货物不同尺寸、品规复杂程度给出最大存储方案

环境适应性强
系统可部署于常温、冷库、恒温恒湿等多种仓储环境中,尤其适合对环境要求较高的医药、食品等行业。

人力成本低
减少人为操作风险。

作业效率提升
基于WMS系统调度取货精准,24小时作业。
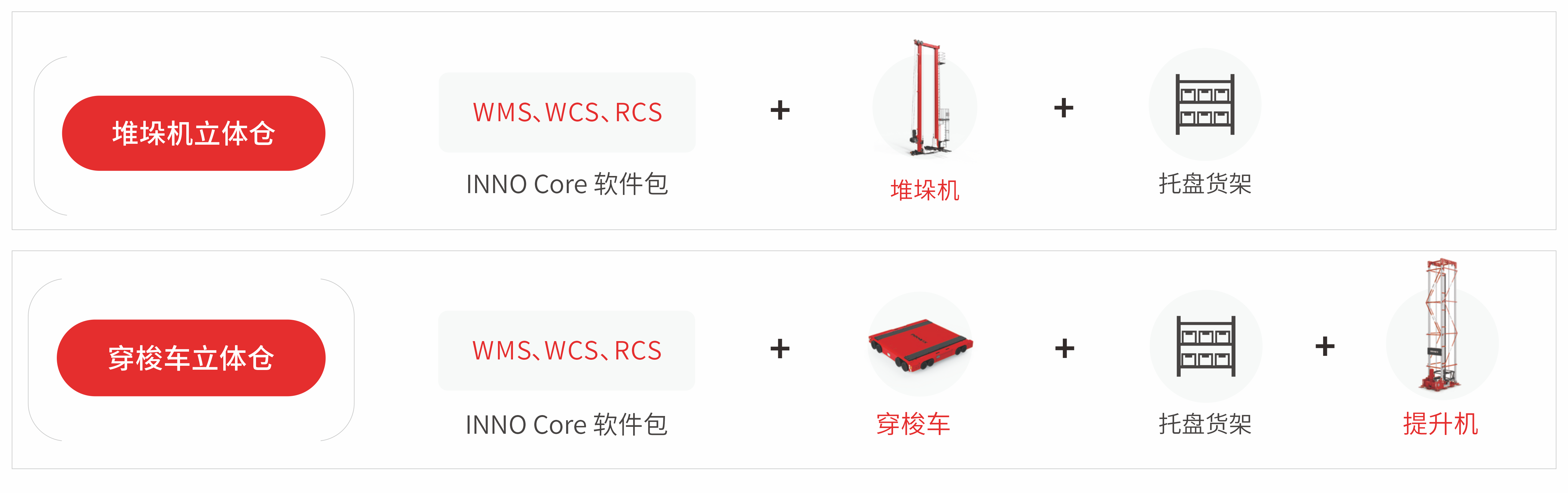
方案适配产品